Lec21 - 特征值和特征向量
第 21 课 特征值和特征向量
特征值与特征向量初探
给定矩阵 $A$ ,矩阵 $A$ 乘以向量 $x$,就像是使用矩阵 $A$ 作用在向量 $x$上,最后得到新的向量 $Ax$。在这里,矩阵 $A$ 就像是一个函数,接受一个向量 $x$ 作为输入,给出向量 $Ax$ 作为输出。
在这一过程中,我们对一些特殊的向量很感兴趣,也即 $x$ 和 $Ax$ 始终保持同一个方向,这是比较特殊的,因为在大多情况下,$Ax$ 与 $x$ 指向不同的方向。
在这种特殊的情况下,$Ax$ 平行于 $x$,我们把满足这个条件的非零向量 $x$ 称为 $A$ 特征向量,而 $\lambda$ 为 $A$ 的特征值 。这个平行条件用方程表示就是:
对这个式子,我们试着计算特征值为 $0$ 的特征向量,易得 $Ax=0x=0$,因此,特征值为 $0$ 的特征向量位于 $A$ 的零空间中。
显然对于奇异矩阵(不可逆),必然存在非零向量使得 $Ax=0$,所以若矩阵是奇异的,那么它有一个特征值为 $\lambda =0$。
我们先来看投影矩阵 $P=A(A^TA)^{-1}A^T$ 的特征值和特征向量。
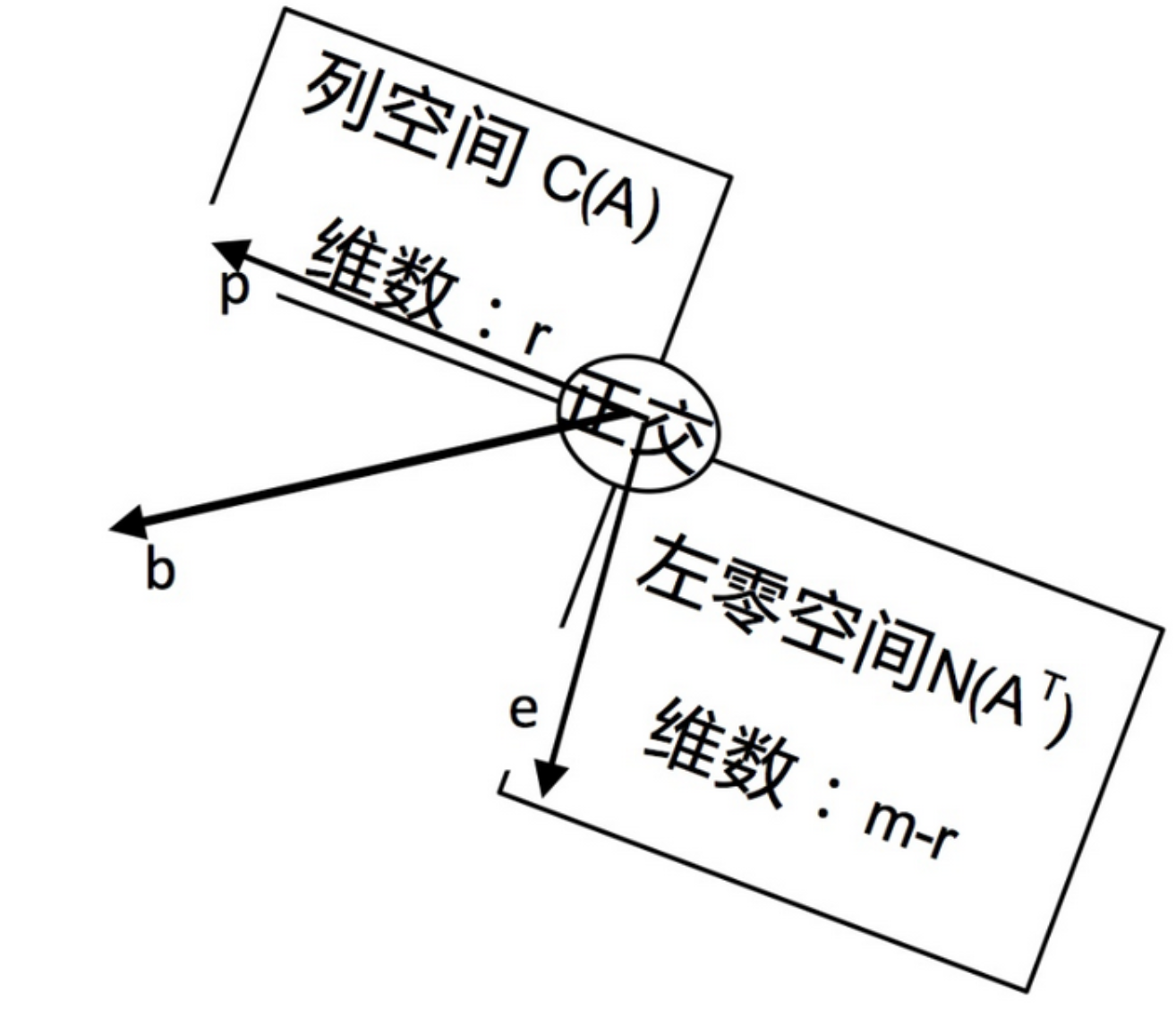
- 用向量 $b$ 乘以投影矩阵 $P$ 得到投影向量 $Pb$,在这个过程中,只有当 $b$ 本身已经处于投影平面(即 $A$ 的列空间)中时,$Pb$ 才可能与 $b$ 是同向的,此时 $b$ 投影前后完全相同($Pb=1\cdot b$)。因此,投影平面($A$ 的列空间)中的所有向量都是投影矩阵的特征向量,且它们的特征值为 $1$。
- 再来观察投影平面的法向量,也即向量 $e$ 。既然向量 $e$ 与投影平面垂直,那么必然有 $Pe=0$,任何向量都与 $0$ 向量是同向的。因此,投影平面的所有法向量($A$ 的左零空间)也同样是投影矩阵的特征向量,且它们的特征值为 $0$。
综上可知,投影矩阵 $P=A(A^TA)^{-1}A^T$ 的特征值为 $\lambda=1,0$。
再看另外一个例子,二阶置换矩阵 $A=\begin{bmatrix}0& 1\\1& 0\end{bmatrix}$,经过这个矩阵处理的二维向量 $x$,其元素会互相交换,即:$\begin{bmatrix}x_1\\x_2\end{bmatrix}$ 会变为 $\begin{bmatrix}x_2\\x_1\end{bmatrix}$。若交换后的 $\begin{bmatrix}x_2\\x_1\end{bmatrix}$ 是初始向量 $\begin{bmatrix}x_1\\x_2\end{bmatrix}$ 与一个因子的乘积,那么根据特征值和特征向量的定义可知:
- $A$ 有特征值为 $1$ 的特征向量(即经过矩阵交换元素前后仍然不变),型为 $\begin{bmatrix}1\\1\end{bmatrix}$。
- $A$ 有特征值为 $-1$ 的特征向量(即经过矩阵交换元素前后方向相反),型为 $\begin{bmatrix}1\-1\end{bmatrix}$。
就此例,我们提前说一些特征值的性质:
一个 $n\times n$ 的矩阵包含 $n$ 个特征值(可能其中有一些特征值的值相同,甚至有些特征值非实数),而这些特征值的和与该矩阵对角线元素的和相同($\sum_{i=1}^n \lambda_i=\sum_{i=1}^n a_{ii}$),我们把矩阵对角线元素之和称为矩阵的迹。
在上面二阶转置矩阵的例子中,如果我们求得了一个特征值 $1$,那么利用迹的性质,我们就可以直接推出另一个特征值是 $-1$。这条性质我们将在本课后面给予证明。
对称矩阵,其特征向量互相垂直。
矩阵越特殊,则我们得到的特征值与特征向量也就越特殊。看上面的二阶置换矩阵中,因为它是一个对称矩阵,所以其特征值为实数:$1,−1$,而且它们的特征向量是正交的。
证明:对称矩阵的特征向量正交。
求解特征值和特征向量:$Ax=\lambda x$
对于方程 $Ax=\lambda x$ ,有两个未知数,我们需要利用一些技巧从这一个方程中一次解出两个未知数(一个是特征值一个是特征向量),首先移项得 $(A-\lambda I)x=0$。
观察新方程 $(A-\lambda I)x=0$,右边的矩阵 $\lambda I$ 相当于将 $A$ 矩阵平移了 $\lambda$ 个单位,而如果新方程有非零解 $x$(因为要求特征向量不可为零向量),则这个平移后的矩阵 $(A-\lambda I)$ 一定是奇异矩阵。
我们现在想要求的特征向量正是 $(A-\lambda I)x=0$ 的非零解 $x$,这就需要 $(A-\lambda I)$ 为奇异矩阵,结合行列式可得:
这样一来,方程中就没有 $x$ 了,$\det(A-\lambda I) =0$ 也叫作特征方程。求解特征方程的带特征值 $\lambda$,代回 $(A-\lambda I)x=0$,继续求 $(A-\lambda I)$ 的零空间即可。
举一个简单的例子,求解 $A=\begin{bmatrix}3& 1\\1& 3\end{bmatrix}$ 的特征值与相应的特征向量。
首先计算 $\det{(A-\lambda{I})}=\begin{vmatrix}3-\lambda& 1\\1& 3-\lambda\end{vmatrix}=0$,由二阶行列式公式可得:$(3-\lambda)^2-1=\lambda^2-6\lambda+8=0$,求得 $\lambda_1=4,\lambda_2=2$。可以看到一次项系数 $-6$ 和矩阵的迹 $3+3$ 有关,此外,常数项 $8$ 与矩阵的行列式有关。至于为什么,我们将在后面给予解释。
继续计算特征向量,$A-4I=\begin{bmatrix}-1& 1\\1& -1\end{bmatrix}$,显然矩阵是奇异的(如果是非奇异说明特征值计算有误),解出 $\lambda_1$ 对应的一个特征向量 $x_1=\begin{bmatrix}1\\1\end{bmatrix}$;同理计算另一个特征向量,$A-2I=\begin{bmatrix}1& 1\\1& 1\end{bmatrix}$,解出 $\lambda_2$ 对应的一个特征向量 $x_2=\begin{bmatrix}1\-1\end{bmatrix}$。
回顾前面转置矩阵的例子,对矩阵 $A’=\begin{bmatrix}0& 1\\1& 0\end{bmatrix}$ 有 $\lambda_1=1, x_1=\begin{bmatrix}1\\1\end{bmatrix},$$ \lambda_2=-1, x_2=\begin{bmatrix}-1\\1\end{bmatrix}$。
看转置矩阵 $A’$ 与本例中的对称矩阵 $A$ 有什么联系。
易知 $A=A’+3I$,两个矩阵特征向量相同,而其特征值刚好相差 $3$。也就是如果给一个矩阵加上 $3I$,则它的特征值会加 $3$,而特征向量不变。
这一点是很容易证明的,如果 $Ax=\lambda x$,则 $(A+3I)x=\lambda x+3x=(\lambda+3)x$,所以 $x$ 还是原来的 $x$ ,而 $\lambda$ 变为 $\lambda+3$。
但假设我们加的不是 $cI$ ($c$ 为常数)而是其他一般的矩阵 $B$,那么就不能像上面这么做了。比如已知 $Ax=\lambda x, Bx=\alpha x$,那么 $(A+B)x=(\lambda+\alpha)x$ 一般是错误的。问题的关键在于:我们无法相信 $A$ 的特征向量 $x$ 也是 $B$ 的特征向量,也即这两个式子中的特征向量 $x$ 并不一定相同,所以上述两个式子的通常情况是:$Ax=\lambda x, By=\alpha y$ ,它们也就无从相加了。而若 $B=cI$,那么我们总能保证 $A$ 的特征向量 $x$ 也会是 $B$ 的特征向量,因为给定任意向量 $x$,显然都有 $cIx=cx$,也即 $B$ 的特征向量实际上包含了 $A$ 的特征向量。
对于刚刚的例子,我们已经发现一次项系数似乎和矩阵的迹存在关系,更普遍地,能注意到矩阵的特征值之和等于矩阵的迹。同时如果我们计算矩阵 $A$ 的行列式,能发现 $\det(A)=8=\lambda_1\cdot\lambda_2$。下面我们给出两条有关矩阵特征值的性质:
- 矩阵的特征值之和等于矩阵的迹
- 矩阵的特征值之积等于矩阵的行列式
鉴于这两条性质的证明需要用到根与系数的关系,也即韦达定理,所以我们先给予韦达定理的证明。
- 矩阵的特征值之和等于矩阵的迹:$\sum_{i=1}^n \lambda_i=\sum_{i=1}^n a_{ii}$
- 矩阵的特征值之积等于矩阵的行列式:$\prod_{i=1}^n\lambda_i=\det(A)$
我们再来看旋转矩阵的例子,旋转 $90^{\circ}$ 的矩阵 $Q=\begin{bmatrix}\cos {90^{\circ}}& -\sin {90^{\circ}}\\\sin {90^{\circ}}& \cos {90^{\circ}}\end{bmatrix}=\begin{bmatrix}0& -1\\1& 0\end{bmatrix} $(作用到向量上能将向量旋转 $90^{\circ}$,用 $Q$ 表示旋转矩阵是因为旋转矩阵是正交矩阵中相当重要的例子)。
根据上面提到特征值的两个性质:特征值之和等于矩阵的迹,特征值之积等于矩阵的行列式,则对于 $Q$ 矩阵,有 $\begin{cases}\lambda_1+\lambda_2& =0\\\lambda_1\cdot\lambda_2& =1\end{cases}$,再来思考特征值与特征向量的由来,哪些非向量旋转 $90^{\circ}$ 后与自己平行,于是就遇到了麻烦,我们发现,似乎不存在非零向量旋转 $90^{\circ}$ 能与旋转前的自己同向,同时似乎也不存在特征值来满足前面的方程组($\lambda_1$ 与 $\lambda_2$ 异号但其相乘结果却为正数)。
由 $\det(Q-\lambda I)=\begin{vmatrix}\lambda& -1\\1& \lambda\end{vmatrix}=\lambda^2+1=0$ 可得特征值为 $\lambda_1=i, \lambda_2=-i$。这两个特征值显然满足 $\begin{cases}\lambda_1+\lambda_2& =0\\\lambda_1\cdot\lambda_2& =1\end{cases}$,但这两个特征值并不是实数。我们发现,即使矩阵全是实数,其特征值也可能不是实数,本例中的实数矩阵其特征值就为一对共轭复数。
实际上,如果矩阵是对称的或者说接近对称的,那么特征值一般就是实数。如果越不对称,就像上面旋转矩阵的例子,$Q^T=-Q$,这说明旋转矩阵是一个反对称的矩阵,这样的矩阵,其特征值往往就是纯虚数。
实数特征值让特征向量伸缩而虚数让其旋转。
到现在为止我们看到,对于好的矩阵(最上面提到的置换矩阵)有实特征值及正交的特征向量,对于不好的矩阵($90^{\circ}$ 旋转矩阵)有纯虚的特征值。
上面我们提到了旋转矩阵,下面将就二维情况进行推导
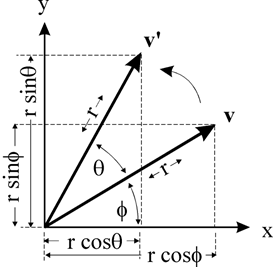
如图所示点 $v$ 绕原点旋转 $\theta$ 角,得到点 $v’$,假设 $v$ 点的坐标是 $(x,y)$,那么可以推导得到 $v’$ 的坐标 $(x’,y’)$
再来看一个更糟的情况,$A=\begin{bmatrix}3& 1\\0& 3\end{bmatrix}$。
这是一个三角矩阵,对于这样的矩阵我们可以直接得出其特征值,即矩阵对角线上的元素。$\det(A-\lambda I)=\begin{vmatrix}3-\lambda& 1\\0& 3-\lambda\end{vmatrix}=(3-\lambda)^2=0$,于是 $\lambda _1=3,\lambda_2=3$。特征值为实数,看上去似乎很好,但实际上这是非常糟糕的情况,这体现在特征向量上。
代入特征值计算特征向量:代入 $\lambda_1=3$ 得 $(A-\lambda I)x=\begin{bmatrix}0& 1\\0& 0\end{bmatrix}\begin{bmatrix}x_1\\x_2\end{bmatrix}=\begin{bmatrix}0\\0\end{bmatrix}$,算出 $x_1=\begin{bmatrix}1\\0\end{bmatrix}$。而当我们把第二个特征值 $\lambda_2=3$ 代入时,等式和之前是一样的,又得到相同的向量。于是,我们根本无法找到另外一个与 $x_1$ 线性无关的特征向量了。
本例中的矩阵是一个退化矩阵,我们只能找到一个方向上的特征向量而不是两个。对于一个退化矩阵,重复的特征值在特殊情况下可能导致特征向量的短缺。