Lec16 - 投影矩阵和最小二乘法
第 16 课 投影矩阵和最小二乘法
本章将深入研究投影矩阵,同时对上一课最后引出的最小二乘法做进一步地讲解。最后引出标准正交向量组等概念。
投影矩阵
上一章已经介绍过投影矩阵 $P=A(A^TA)^{-1}A^T$。我们知道,投影矩阵 $P$ 与向量 $b$ 相乘将会把 $b$ 投影到 $A$ 的列空间中。那么现在我们来考虑两个极端的例子,这两个极端的例子将会加深我们对投影矩阵的理解。
如果 $b$ 在矩阵 $A$ 的列空间里, 那么 $Pb=b$
如果 $b$ 垂直于矩阵 $A$ 的列空间,那么 $Pb=0$
通过上面两个极端的例子,我们可以看出来,向量 $b$ 总可以分为两个分量,一个分量在 $A$ 的列空间中,另一个分量垂直于 $A$ 的列空间(也即在 $A$ 的左零空间中)。而上述投影矩阵的作用就是保留列空间中的分量 $p$,去掉左零空间中的分量 $e$。
可以通过一幅图来表示这个关系:
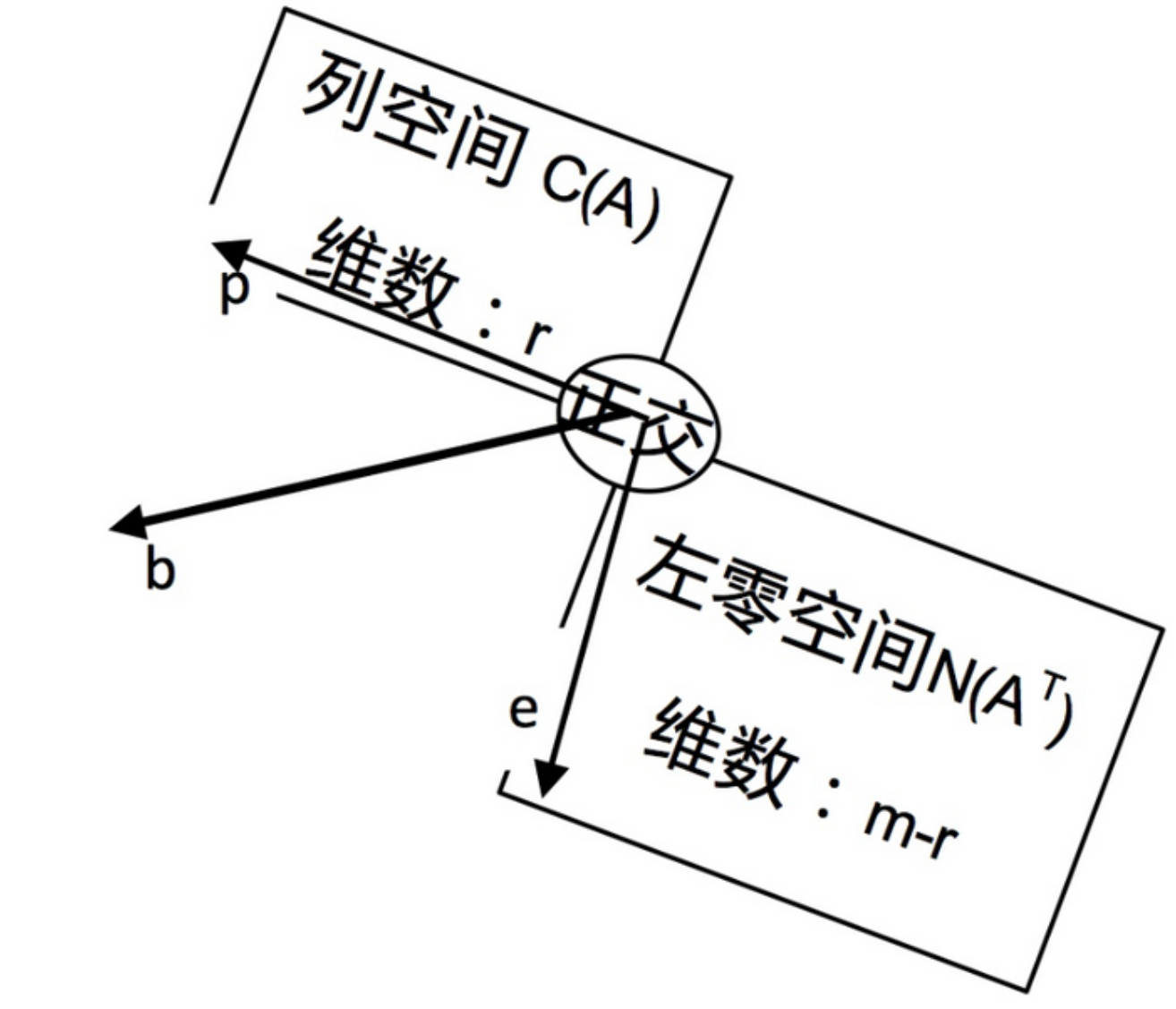
$P$ 把 $b$ 投影到 $A$ 的列空间上得到 $p$。那么,是否存在另外一个投影矩阵把 $b$ 投影到 $A$ 的左零空间上得到 $e$ 呢?由 $b=e+p,p=Pb$ 可得 $e=b-p=b-Pb=(I-P)b$。这里的 $I-P$ 就是 $A$ 的左零空间上的投影矩阵,它具有和 $P$ 一样的性质(对称性与平方不变性)。
最小二乘法
回到上一讲最后我们提到的关于最小二乘法的例题:
没有直线能经过图中的三个点,所以我们需要找到一条最优的直线 $y=C+Dx$ 来拟合图中的三个点,这里的最优指的是该直线距离图中三个点 $(1,1)\ (2,2)\ (3,2)$ 的总误差最小!
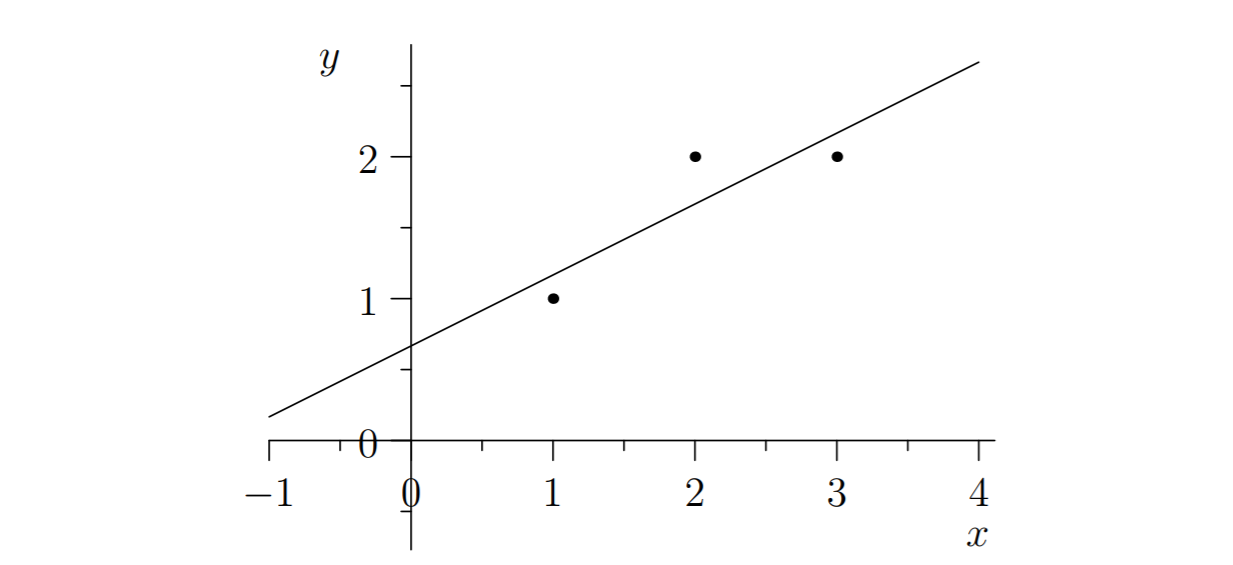
根据以上条件可以得到方程组 $\begin{cases} C+D&=1 \\ C+2D&=2 \\ C+3D&=2 \\ \end{cases}$,写作矩阵形式有 $\begin{bmatrix}1 &1 \\1 &2 \\1&3\\\end{bmatrix}\begin{bmatrix}C\\D\\\end{bmatrix}=\begin{bmatrix}1\\2\\2\\\end{bmatrix}$,也就是我们的 $Ax=b$,显然该方程组无解。
在寻求最优解之前,我们需要先定义总误差是什么,因为总误差能够衡量直线是否是更优的,定义了总误差我们才能通过最小化这个量,来找到最好的 $C$ 和 $D$(也即最优的直线)。
这里,我们定义误差为 $A\hat{x}-b=e$ 的模长的平方来作为误差,也即 $|A\hat{x}-b|^2=|e|^2=e_1^2+e_2^2+e_3^2$,我们要求其最小平方和(也即最小二乘)。
利用微积分的偏导来求最优解
将误差展开用 $C$ 和 $D$ 的二元函数如下:
误差对 $C$ 求偏导为 $6C-10+12D=0$,说明单看 $C$ 的话,随着 $C$ 的增长,总误差的斜率先为负数后为正数,也即总误差先下降后上升。误差对 $D$ 求偏导为 $28D-22+12C=0$,说明单看 $D$ 的话,随着 $D$ 的增长,总误差的斜率先为负数后为正数,也即总误差先下降后上升。因此,总误差的驻点显然也即总误差的最小值(最优值)
求解方程组 $\begin{cases}3C-5+6D=0\\14D-11+6C=0\end{cases}$ 得 $\hat{C}=\frac{2}{3},\hat{D}=\frac{1}{2}$,因此最优直线为 $y=\frac{2}{3}+\frac{1}{2}x$,代入 $x$ 可求得 $p_1=\frac{7}{6}, p_2=\frac{5}{3}, p_3=\frac{13}{6}$,自然 $e_1=-\frac{1}{6}, e_2=\frac{1}{3}, e_3=-\frac{1}{6}$。
于是我们得到 $p=\begin{bmatrix}\frac{7}{6}\\\frac{5}{3}\\\frac{13}{6}\end{bmatrix}, e=\begin{bmatrix}-\frac{1}{6}\\\frac{1}{3}\\ -\frac{1}{6}\end{bmatrix}$,易看出 $b=p+e$,且 $p^Te=0$(也即 $p\bot e$)。
综上可知,我们所求得的误差向量 $e$ 确实垂直于整个列空间,如 $\begin{bmatrix}1\\1\\1\end{bmatrix}, \begin{bmatrix}1\\2\\3\end{bmatrix}$(投影向量 $p$ 也在 $A$ 的列空间中)。
利用线性代数的投影来求最优解
为了方便理解,我们需要再次搬出这张图:
$A\hat{x}$ 也即 $A$ 的列空间中的向量,那么 $A\hat{x}-b$ 就表示了将列空间中的向量与 $b$ 相减,相减所得的向量,或许垂直于列空间,或许不垂直与列空间。
但注意到,只有在相减所得的向量垂直于列空间的时候,$A\hat{x}-b$ 其模长的平方才最小,这也即让 $b$ 对列空间做投影,投影所得向量 $Pb$ 才是列空间中距离 $b$ 最近的向量。此时求解 $A\hat{x}=Pb$ 所得的 $\hat{x}$ 即为最优解!
写成方程组形式为 $\begin{cases}3\hat C+16\hat D&=5\\6\hat C+14\hat D&=11\\\end{cases}$,也称其为 $\color{red}{正规方程组(normal\ equations)}$。
注意到该正规方程组正是先前求偏导所得的方程组。故所求得的结果也都是一样的:$\hat{C}=\frac{2}{3},\hat{D}=\frac{1}{2}$。
我们现在所做的运算实际上也称为 $\color{red}{线性回归(linear\ regression)}$。
此外,还需要补充说明一点,如果在上述例题中,还有另外一个点如 $(0, 100)$,那么最小二乘法就很容易被这个明显离群的值影响,通常使用最小二乘的时候要先去除掉明显离群的点!
标准正交向量组
有一种线性无关的情况是比较特殊的:互相垂直的各列一定是线性无关的。
更特殊地,我们会要求互相垂直的单位向量(标准正交),比如 $\left[\begin{array}{l}{1} \\ {0} \\ {0}\end{array}\right],\left[\begin{array}{l}{0} \\ {0} \\ {1}\end{array}\right],\left[\begin{array}{l}{0} \\ {1} \\ {0}\end{array}\right]$,这些向量所组成的向量组一般被称为标准正交向量组,标准正交向量组中的向量互相垂直(正交)且为单位向量(标准)!
同样的标准正交向量组还有:$\left[\begin{array}{c}{\cos \theta} \\ {\sin \theta }\end{array}\right],\left[\begin{array}{c}{-\sin \theta} \\ {\cos \theta}\end{array}\right]$。