Lec15 - 子空间投影
第 15 课 子空间投影
这一章我们讲投影,从向量的投影入手,延伸到高维投影,并将投影使用矩阵形式来给出。上一章中我们介绍了正交的基本概念,这一章我们将会使用到这个概念,做投影也即向另一个向量上做垂线。此外上一章我们讨论了当 $Ax=b$ 无解时的最优解求解问题,但我们并没有解释这个最优解为何“最优”,本章将会给出相应的解释。
相对简单的二维空间的投影
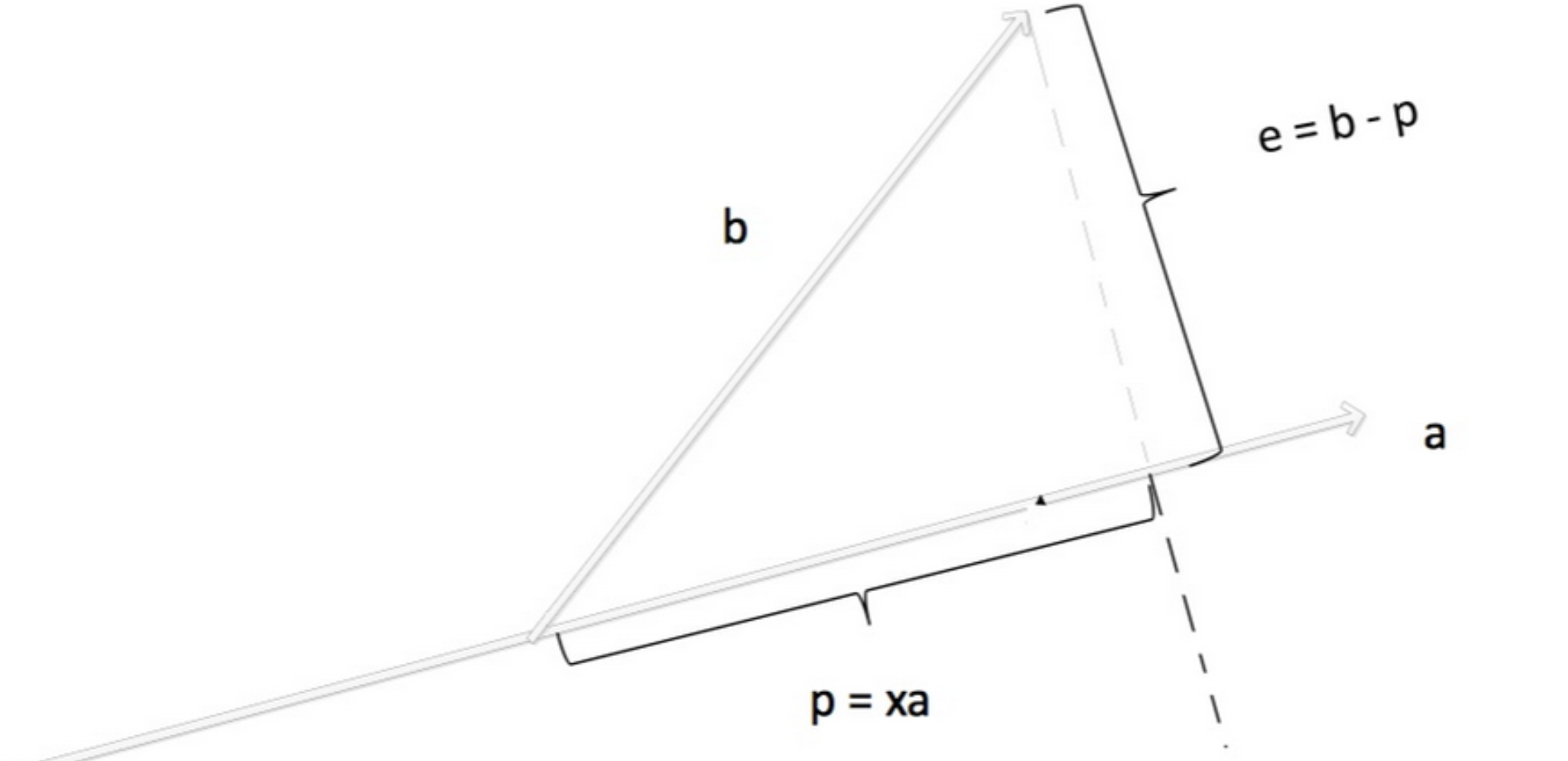
如上图,$p$ 也即向量 $b$ 在向量 $a$ 上的投影,$p$ 在向量 $a$ 上,是 $a$ 的倍数,故令 $p=xa$。将 $b$ 与 $p$ 的差设为 $e$, $e$ 带有误差的意思,同时 $e$ 的模在某种程度上表示了 $b$ 到 $a$ 的最短距离(而这正是最优的体现:误差最小)。$e$ 与 $a$ 正交。
注意,其中的 $a^Ta$ 是一个标量,而 $aa^T$ 是一个矩阵。假设 $b$ 变为原来的 $2$ 倍,那么显然投影 $p$ 也变为原来的 $2$ 倍。但如果 $a$ 变为原来的 $2$ 倍,整个 $\frac{aa^T}{a^Ta}$ 并没有发生变化,所以投影 $p$ 不变。
到这里,我们大概感觉到 $\frac{aa^T}{a^Ta}$ 此式的妙用了,该式是一个矩阵,令 $P=\frac{aa^T}{a^Ta}$,则有 $p=Pb$,我们将 $P$ 称为投影矩阵,当向量与 $P$ 相乘后,即可得到向量对应的到 $a$ 上的投影。
得到投影矩阵后,我们来研究该投影矩阵的性质:
$rank(P)=1$。 $P$ 中的 $aa^T$ 是一个矩阵,$a^Ta$ 是一个标量,所以 $rank(P)=rank(aa^T)$ ,又因为 $rank(aa^T)=rank(a^T)=rank(a)=1$(上一节课最后我们提到的性质二),所以 $P$ 的秩为 $1$ 。
向量 $a$ 是 $P$ 的列空间的基,向量 $a$ 所在的直线是 $P$ 的列空间。
$P$ 乘以任意向量 $b$ 所得到的结果即为投影 $p$,而 $p$ 就在 $a$ 所在的直线上,这也即意味着,对 $P$ 的各列进行任意的 $b$ 对应的线性组合的结果都在 $a$ 所在的直线上,所以向量 $a$ 是 $P$ 的列空间的基,向量 $a$ 所在的直线是 $P$ 的列空间。
从矩阵的乘法定义上也不难发现该性质!
$P$ 是对称的。显然,因为 $P=Caa^T=\frac{1}{a^Ta}aa^T$ 中的 $aa^T$ 是一个对称矩阵。
$P^2=P$,因为给定向量 $b$,对其进行一次 $P$ 投影和对其进行两次 $P$ 投影,结果相同。
相对复杂的三维空间的投影
在上一章中我们讨论了无解方程 $Ax=b$ 的最优解求解问题,现在我们可以给出关于“最优”的解释了。实际上,解的最优性就体现在 $b$ 的变化最小上,而变化最小是通过投影来实现的,这也即我们介绍投影的原因。
$Ax$ 总是在 $A$ 的列空间里,而 $b$ 却未必在 $A$ 的列空间里。面对这样的无解情况,我们要寻找其最优解,方法就是对 $b$ 进行变化程度最小的调整并确保调整后的 $b$ 在 $A$ 的列空间内。显然,这就是要作 $b$ 到 $A$ 的列空间上的投影 $p$,$p$ 就处于 $A$ 的列空间内且 $p$ 是列空间中最接近 $b$ 的那一个(最接近即最优的体现)。
现在,我们来介绍相对复杂的三维空间的投影。
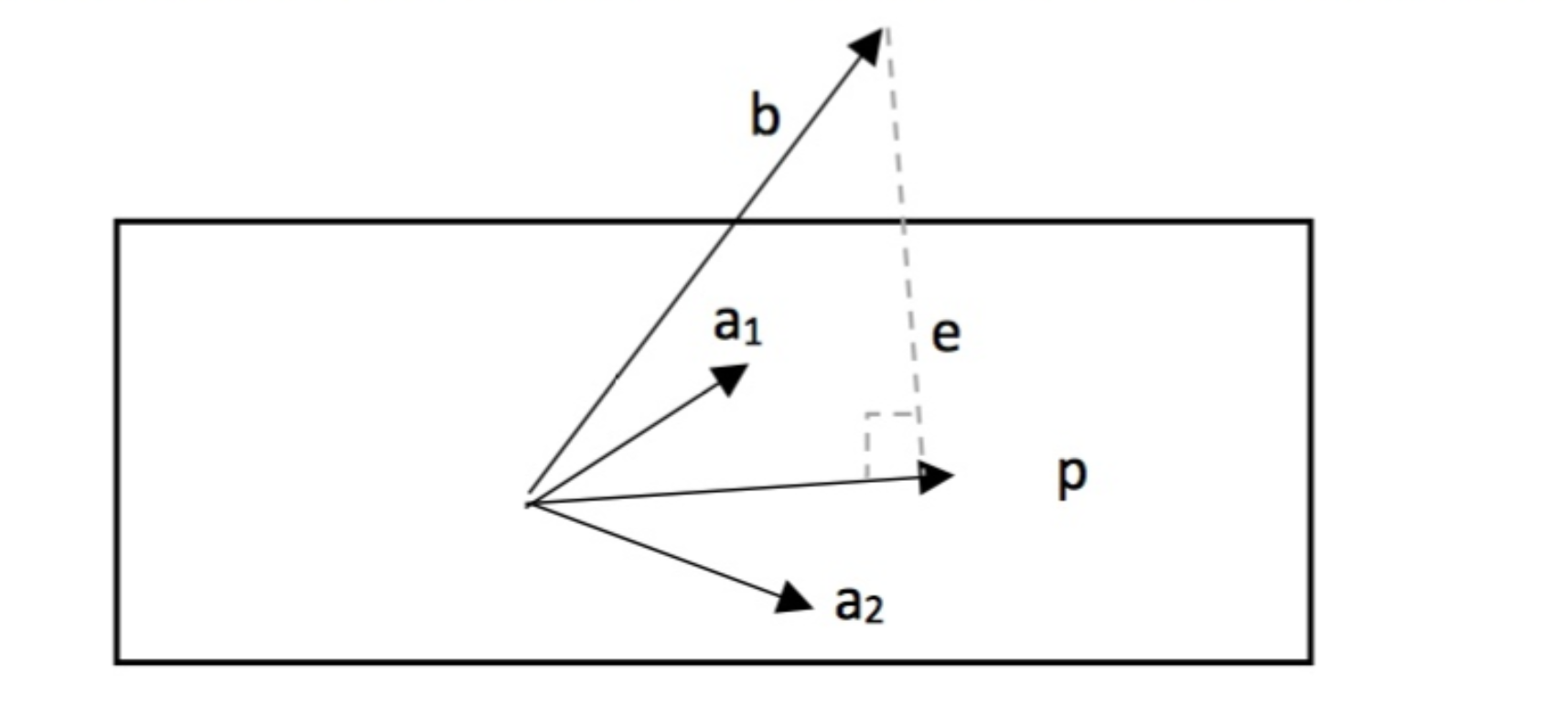
如上图,$a_1,a_2$ 为构成平面的一组基,$p$ 为 $b$ 在平面上的投影,故 $p$ 处在平面上。于是有:$p=\hat{x_1}a_1+\hat{x_2}a_2$,我们更倾向于用矩阵形式写作 $p=A\hat{x}$,其中 $A=\begin{bmatrix}a_1& a_2\end{bmatrix}$,$\hat{x}=\begin{bmatrix}\hat{x_1}\\\hat{x_2}\end{bmatrix}$。容易发现,实际上平面就是矩阵 $A$ 的列空间,由于 $b$ 不在平面上,所以 $Ax=b$ 无解,那么 $A\hat{x}=p$ 中的 $\hat{x}$ 就是我们想要的最优解。
由图可知,$e=b-p=b-A\hat{x}$ 垂直于平面 $A$ ,那么容易得到两个方程$\begin{cases}a_1^T(b-A\hat{x})=0\\a_2^T(b-A\hat{x})=0\end{cases}$,将方程写成矩阵形式有 $\begin{bmatrix}a_1^T\\ a_2^T\end{bmatrix}(b-A\hat{x})=\begin{bmatrix}0\\0\end{bmatrix}$,即 $A^T(b-A\hat{x})=0$。
该式与向量上的投影方程 $a^T(b-xa)=0$ 很相似,对于向量来说,矩阵 $A$ 只有一列,也即一个小写的 $a$,本质都是 $A^Te=0$。由 $A^Te=0$ 可知所有可能的 $e$ 对应着 $A$ 的左零空间,从图像可知 $e$ 垂直于平面($A$ 的列空间),由此例我们很直观地看到了左零空间与列空间的正交。
再化简方程可得 $A^TA\hat{x}=A^Tb$,这个式子恰好就是我们上节课所介绍的式子,至此,我们应该彻底明白了乘以 $A^T$ 的意义何在。现在,我们需要再次考虑:最优解 $\hat{x}$、投影 $p$ 和 投影矩阵 $P$。
$\hat{x}=(A^TA)^{-1}A^Tb$。可以看出来 $A^TA$ 需要是可逆的才能求出最优解。由上一课我们可以知道,当 $A$ 的各列线性无关的时候,$A^TA$ 才是可逆的。
从 $x=A^{-1}b$ 到 $\hat{x}=(A^TA)^{-1}A^Tb$,我们可以看到,$x$ 有解的条件是 $A$ 是可逆的,而 $\hat{x}$ 有解的条件是 $A$ 的各列是线性无关的,其中对 $A$ 的要求是有放宽的,因此,在 $Ax=b$ 无解的情况下尝试 $A^TA\hat{x}=A^Tb$ 以获得最优解的思路是可行的正确的。
$ p=A\hat{x}=\underline{A(A^TA)^{-1}A^T}b$。回忆在二维空间的情况下,下划线部分对应着原来的 $\frac{aa^T}{a^Ta}$。
$P=A(A^TA)^{-1}A^T$。
这里需要注意 $P=A(A^TA)^{-1}A^T$ 是否还能继续化简的问题。如果 $A$ 是一个可逆方阵,那么就可以继续化简,否则不能。假设 $A$ 是一个可逆矩阵,那么化简可得 $P=A(A^TA)^{-1}A^T=AA^{-1}(A^T)^{-1}A^T=II=I$,投影矩阵此时为一个单位矩阵,这一点是自然的,因为如果 $A$ 可逆,那么 $Ax=b$ 必然有解,也即任意 $b$ 都已经在 $A$ 的列空间里了,投影前后 $b$ 没有发生任何变化,故投影矩阵为单位矩阵。
最小二乘法初涉
我们不难发现,上面求得的 $e$ 实际上是一种误差的表现,这样就为我们使用最小二乘法拟合直线提供了一些理论基础。
如图,要求找到一条最优的直线来拟合图中的三个点。
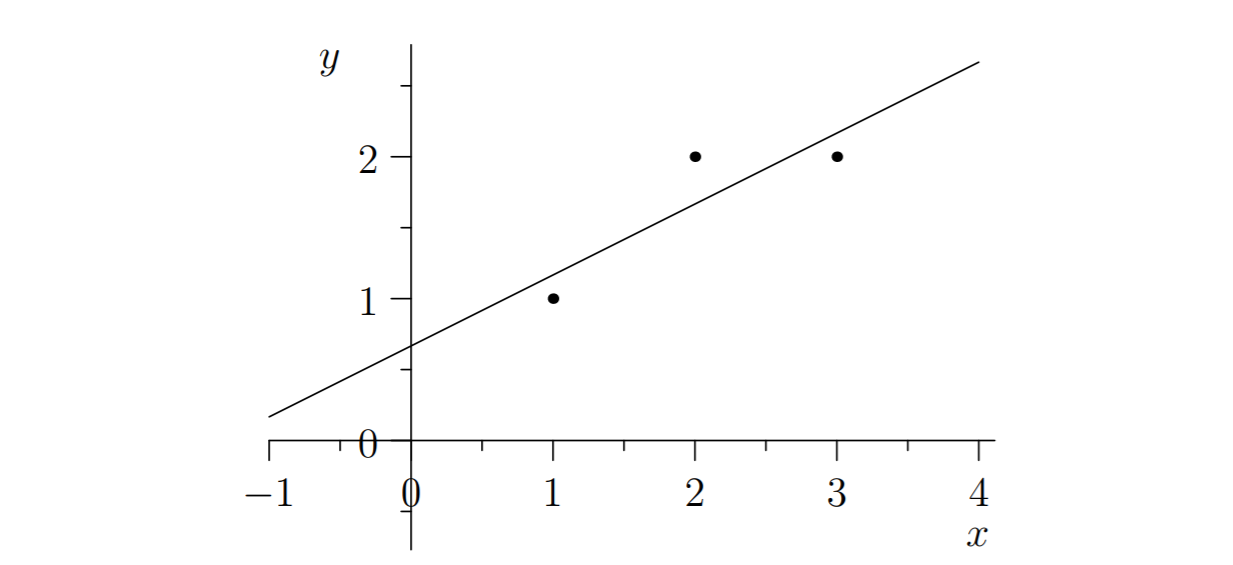
假设最优直线方程为 $C+Dt=b$,代入三个点 $(1,1)\ (2,2)\ (3,2)$ 可得方程组:
写作矩阵形式有:
显然方程组无解,但 $A^TA\hat{x}=A^Tb$ 有解($A$ 的各列线性无关),而 $A^TA\hat{x}=A^Tb$ 也是最小二乘法的核心方程!